
Project Overview:
Body
Principal Investigators: James Patton, PhD; Robert Kenyon, PhD
Co - Investigators: Molly Listenberger, Emily Case-Lazzaro, Yazan Abdel Majeed, Eyad Hajissa, and Amit Shah
Synopsis/Goals of the Project
From our work that employs robotic force application for therapeutic benefit following stroke, this effort is to streamline this technology for the clinic, especially for approaches that supply challenge for use in the clinical setting and beyond. Our approaches employ error augmentation that enhances the re-learning of movement skills (developed in the previous MARS-RERC cycles).
Project Aim #1: Develop and refine a clinic-ready therapy system
Project Aim #2: Broadens application areas to other pathologies
Project Aim #3: Evaluate success outside the lab.
Major Accomplishments
Body
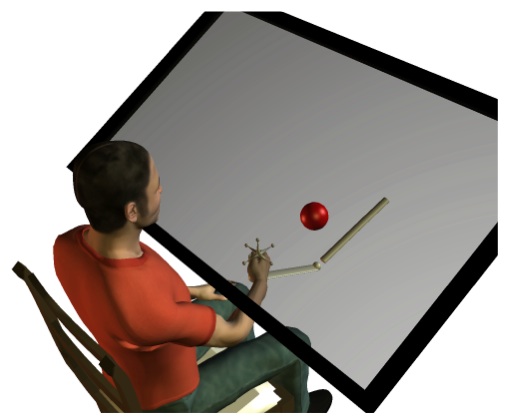
The LookingGlass Device
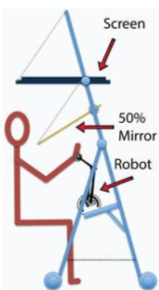
A device needs to allow multiple robotic devices and display possibilities. Our LookingGlass device continues to be improved for therapeutic deployment in the clinic, community rehabilitation center, and the home. This 3-D display uses our own structural design inspired by the rigging of a sailboat, and is multi-featured easier to use, portable, and low cost. We have tested deployment to the clinical setting, and appears to fill a niche as a "upper-extremity treadmill" device for therapy, now being sought for the inpatient Ability Labs at Shirley Ryan 窮멍짇북꽈섦珂역쉽
Body
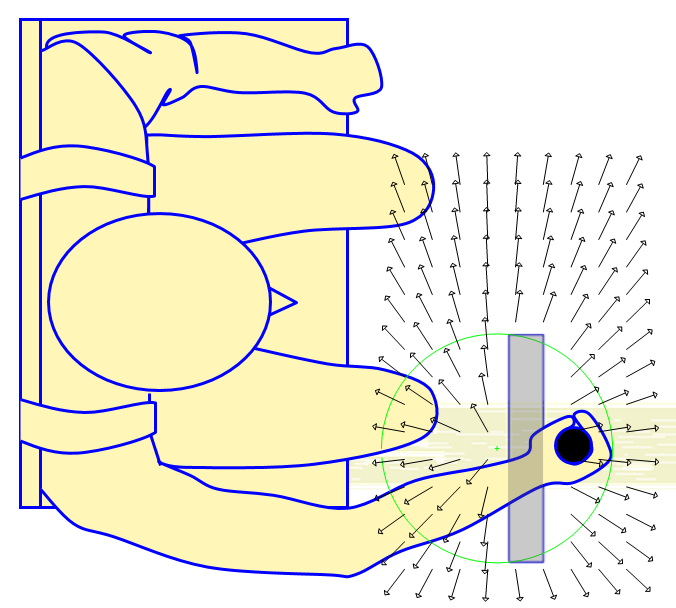
Error augmentation therapy techniques
New techniques for therapy should give the patient an advantage of getting even better after practice. We have shown success in a randomized clinical test on 26 individuals with chronic stroke hemiparesis, haptic (via robot-rendered forces) and graphic (via a virtual environment). We enhanced error while the therapist provided a cue and could tailor the practice to the needs of the patient, while the robot gently pushed the patient away from the cue, and the visual feedback system amplified error by shifting the cursor. These results showed significant advantages over simple repetitive practice. A follow-up study on a variation of the above study where the hemiparetic paretic patient uses their own healthier limb to provide the tracking cue to the unhealthy hand.
For more detailed information (scientific publications, etc.):
Body
The Limit-Push technique for facilitating learning
In both movement training and neuro-rehabilitation, there have been numerous examples of how training with a device can influencing the mean motion pattern, but here the limit-push technique also influences variability of motion. This has been done using robotic forces, and also in a follow-up study using only visual effects. In this second study, the effect was even greater. Excitingly, these limit-push techniques are the first to cause a change in both central tendencies and variability.
For more detailed information (scientific publications, etc.):
-
Eyad Hajissa, Amit Shah, James L. Patton, “ Visual limit-push training alters movement variability”, In review.
- Amit Shah, Eyad Hajissa, James L. Patton,“Reshaping movement tendencies with limit-push robotic training“ In review.
Mentioned Profile
